Strumenti di misura
Analisi Dati e Statistica, 2025–26
![]()
Ultimo aggiornamento: 17/06/2026
Esempio: misura estensimetrica

Trasduttore capacitivo
La capacità è espressa da: \(C=\varepsilon_r A/d\)
- adatto per misure di spostamento con \(d\) molto piccolo e elevata sensibilità (ordine dei nanometri)
- non è lineare (varia con \(1/d\))
- elevata impedenza, quindi necessita di schermatura
- sensibile a \(\varepsilon_r\) (temperatura, umidità)

Trasduttore induttivo diretto
Sfruttando la variazione di induttanza che risulta da uno spostamento dell’armatura:
- Semplice
- Sensibile a effetti ambientali

Trasduttore induttivo differenziale
Linear Variable Differential Transformer: sfrutta la differenza tra due avvolgimenti secondari per movimenti opposti del core:
- più complesso e costoso
- auto-compensato per gli effetti ambientali
- più sensibile
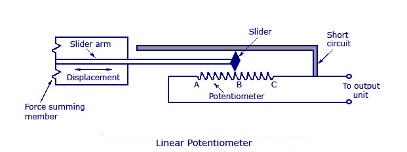
Trasduttore resistivo
Sfrutta una variazione di resistenza in un circuito parallelo \(R_{T} = (1-\Delta)R_v \frac{1}{\Delta R_v + R_{sc}}\)
- economico
- corse discretamente lunghe
- usura
- misura rumorosa

Trasduttore interferometrico
È basato su un conteggio di oscillazioni su una misura di intensità luminosa
- Risoluzione almeno nanometrica, dell’ordine della lunghezza d’onda
- Lunghezze molto grandi (nel vuoto anche milioni di kilometri)
- Sensibile alle proprietà ottiche del mezzo (funzione della temperatura e umidità, se è aria)
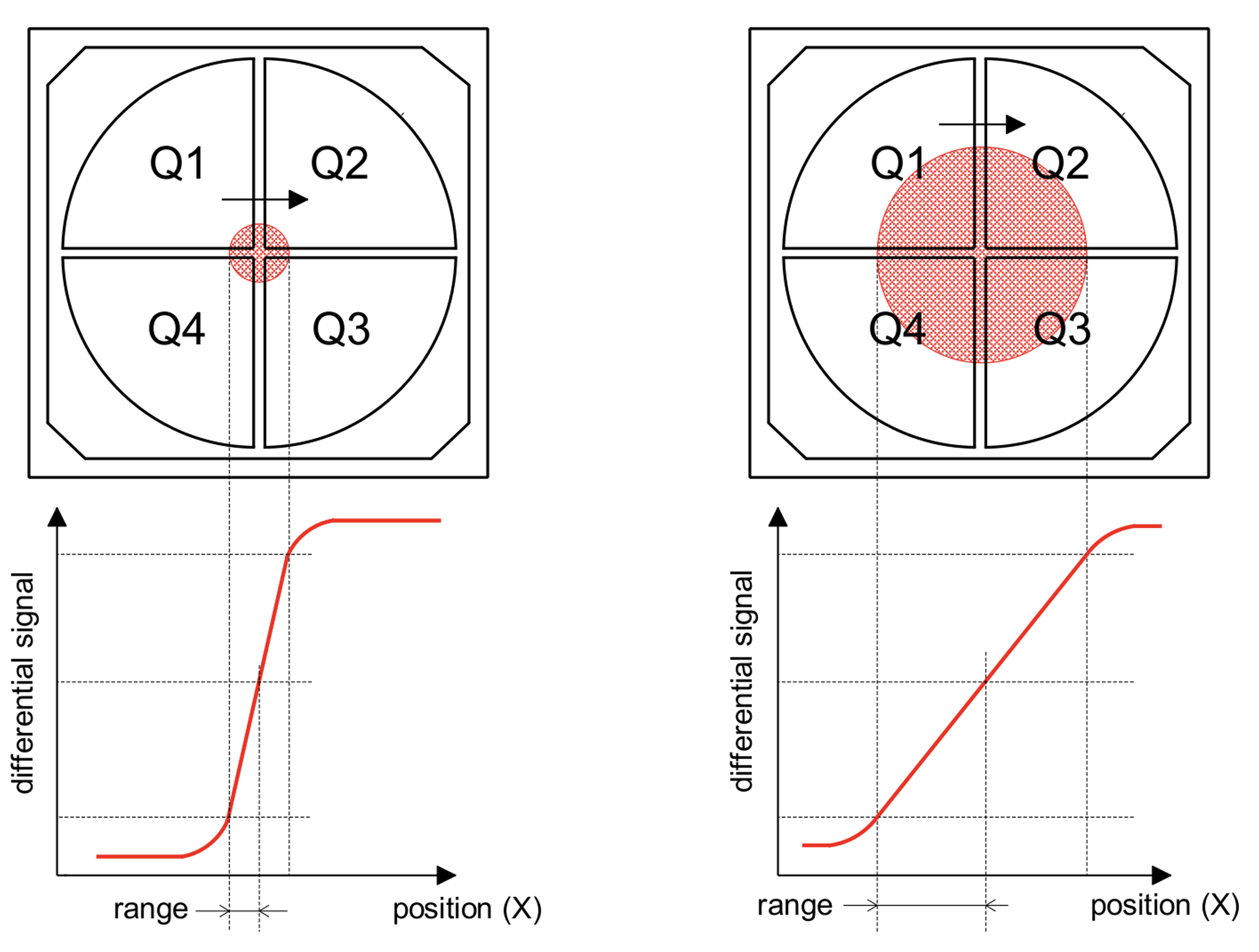
Trasduttore con fotodiodo a quadrante
- Un fascio laser illumina 4 fotodiodi disposti a quadrante
- La differenza tra le correnti generate tra fotodiodi affiancati è proporzionale allo spostamento del fascio in \(X\) e in \(Y\)
- Sensibilità molto elevata
- Corsa limitata
- Bassa linearità
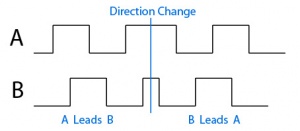
Encoder a riga ottica (relativi)
- Misurano uno spostamento rispetto a un riferimento per conteggio di una serie di impulsi
- Gli impulsi derivano da una griglia di alternanze (trasparente/opaco, poli N/S)
- Due griglie sfasate di 1/4 di periodo consentono di valutare la direzione di moto
- Risoluzione fino a 0.1 µm

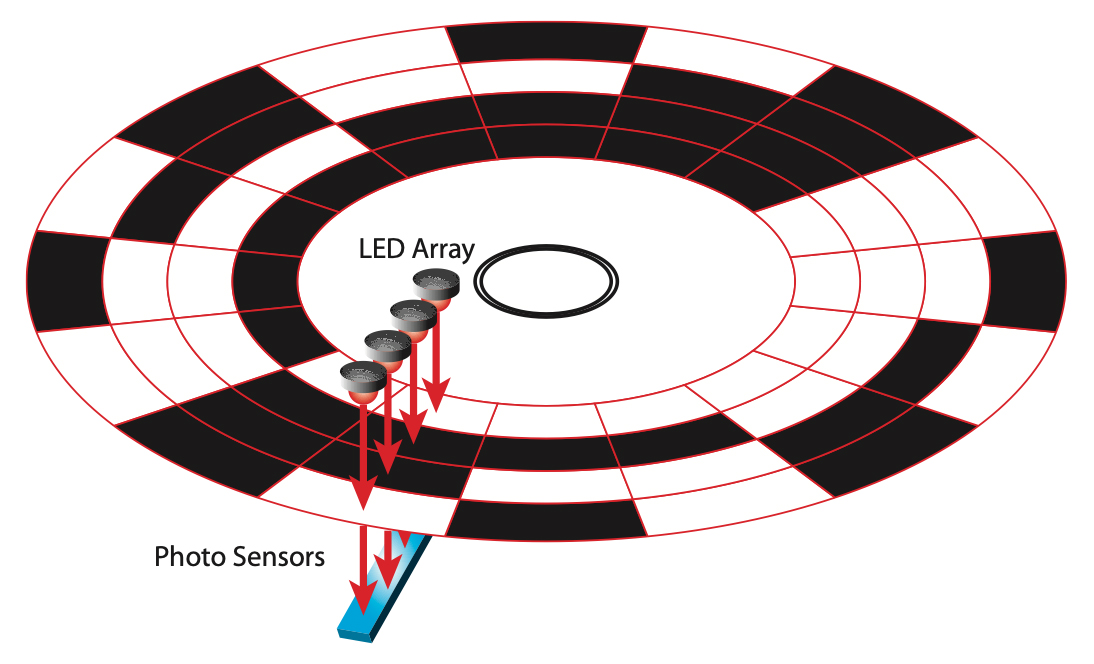
Encoder a riga ottica (assoluti)
- Ogni posizione è identificata in maniera univoca da una sequenza di segnali binari (bianco/nero, N/S)
- Non serve un contatore e la misura è assoluta, non relativa a uno 0
- Serve un numero di detector \(n\) (segnali) che dipende dal numero di posizioni \(N\): \(n=\lceil\log_2(N)\rceil\)
Nota
La notazione \(\lceil x \rceil\) indica l’arrotondamento all’intero superiore (ceiling)
Bilancia analitica
- Concettualmente semplice
- Può essere puramente meccanica
- Precisione dipende dalla qualità delle lavorazioni

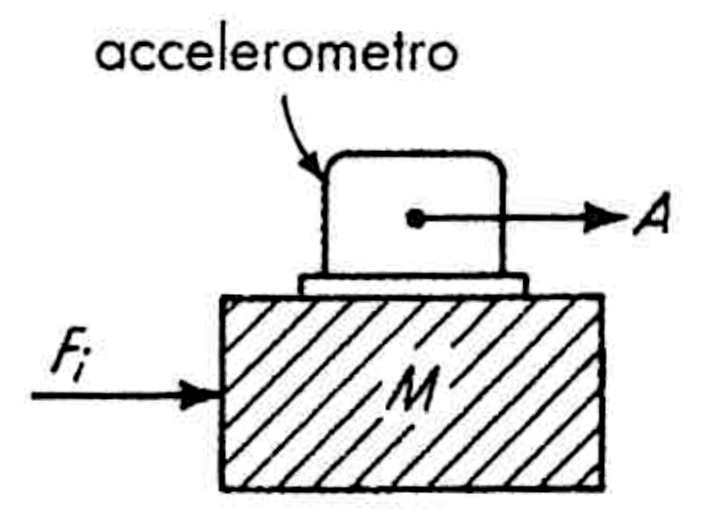
Trasduttore accelerometrico
- Da \(F=Ma\), nota la massa e misurando l’accelerazione si risale alla forza applicata
- È adatta a misure dinamiche, in cui la forza è variabile nel tempo
- Richiede l’accelerometro, che è a sua volta uno strumento di misura (con un trasduttore interno che misura uno spostamento o una deformazione di una massa nota)
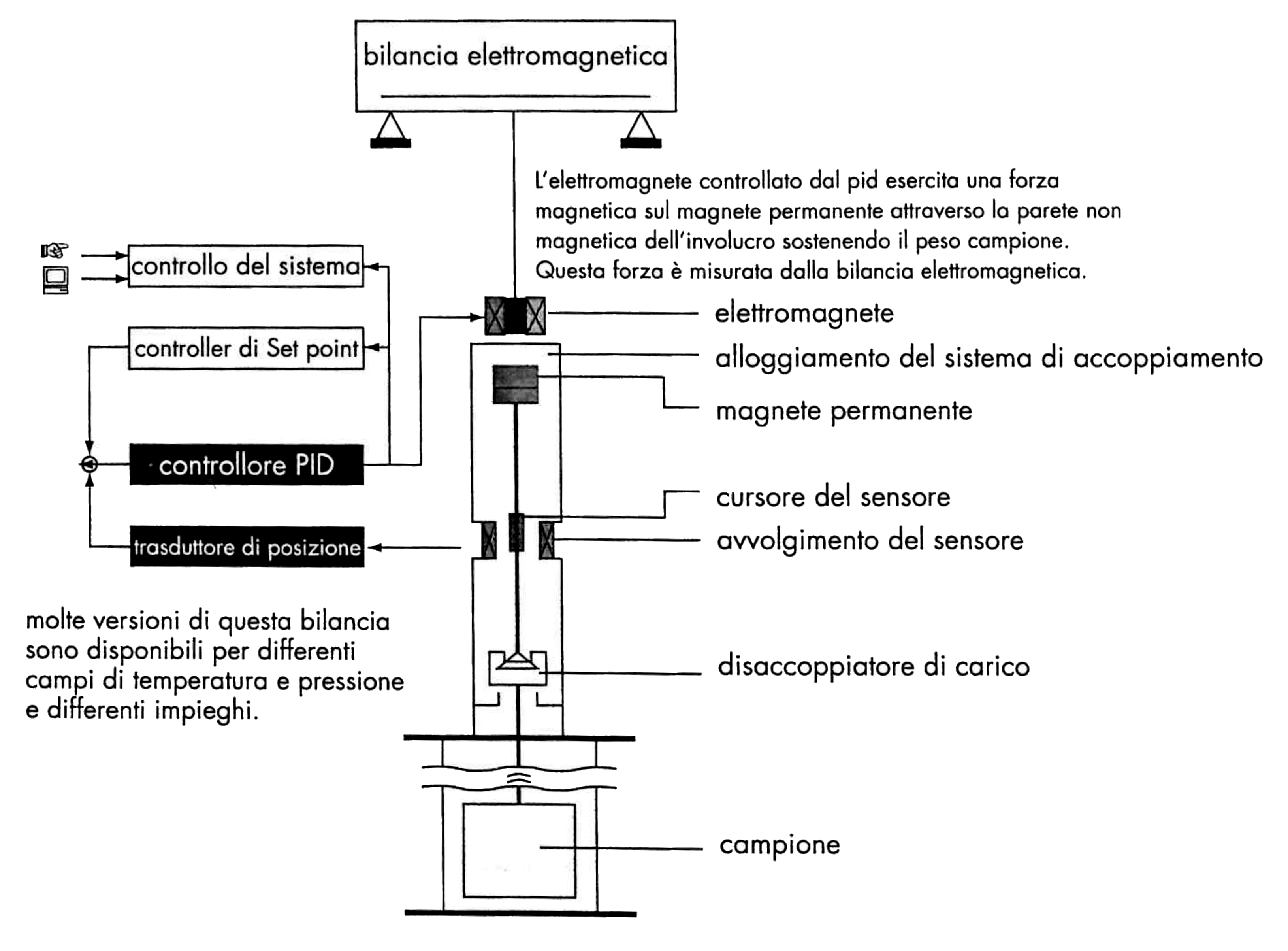
Bilancia elettromagnetica
- Sono basate su un trasduttore di posizione
- Lo scostamento rispetto a una posizione di riferimento è mantenuto nullo alimentando proporzionalmente un avvolgimento elettromagnetico
- La la corrente che alimenta l’avvolgimento è proporzionale alla forza incognita
- la bilancia può essere molto più compatta e più pronta delle bilance analitiche
- richiede un’alimentazione e un controllore
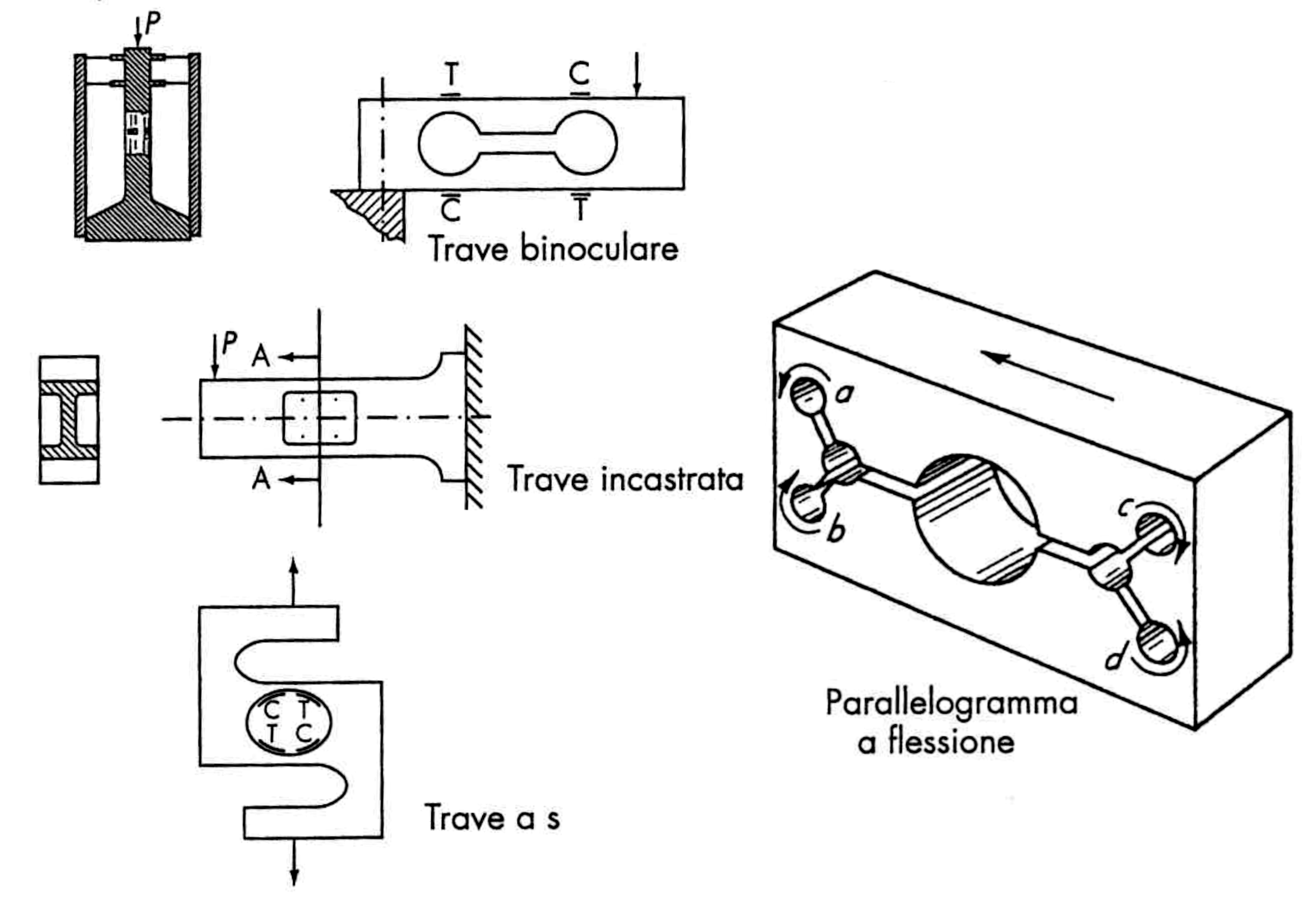
Dinamometro a elementi deformabili (cella di carico)
- Il trasduttore converte una deformazione meccanica in un segnale elettrico
- È adatto sia a misure statiche che a misure dinamiche
- È possibile compensare gli effetti interferenti e modificanti della temperatura
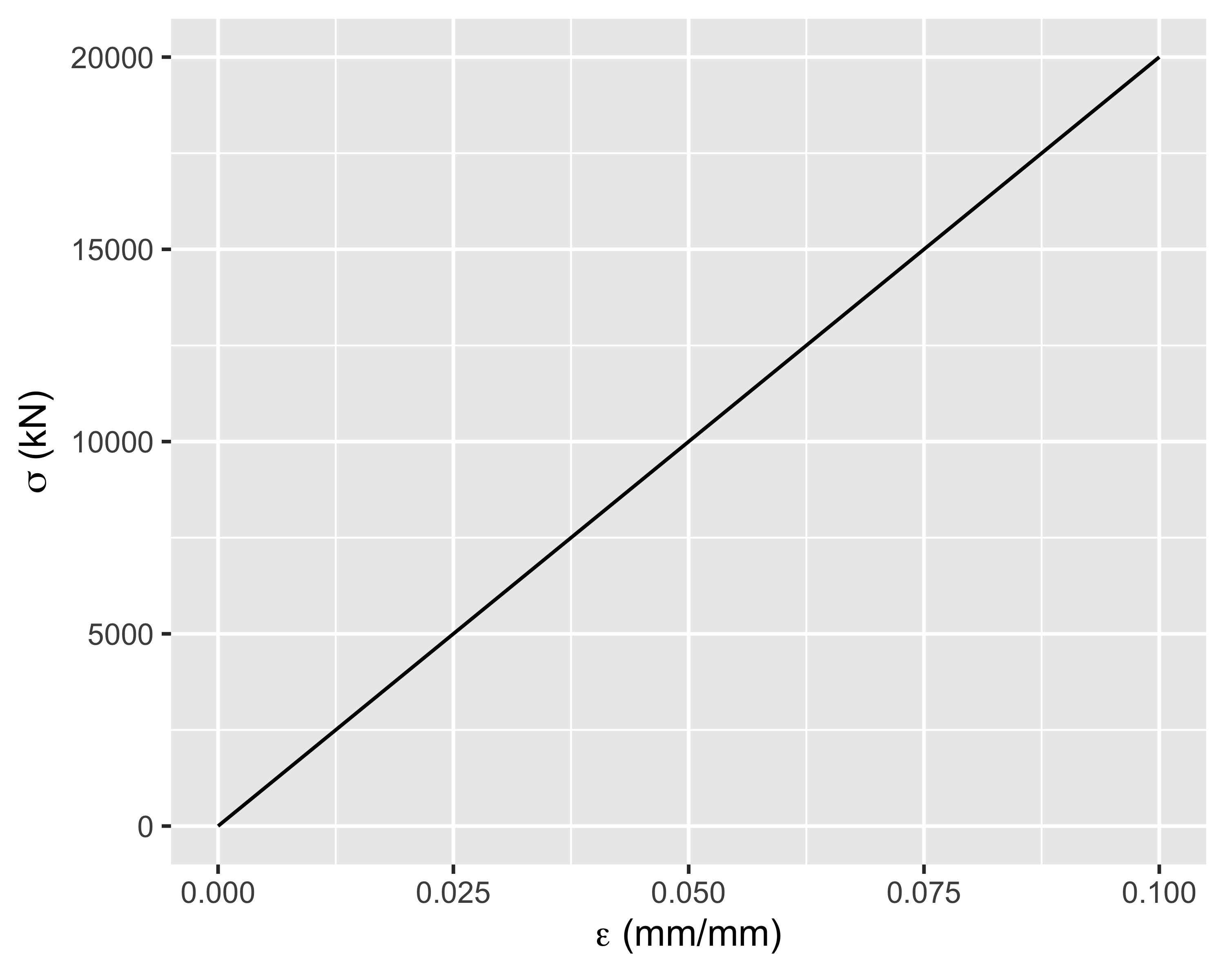
Sforzo e deformazione in campo elastico
In campo elastico la deformazione di un solido è reversibile e lineare
- Vale la legge di Newton: \(\sigma = E \varepsilon\) dove \(\sigma = F/A\) e \(\varepsilon=\Delta L / L_0\)
- \(E\) è il modulo di Young, o modulo elastico, ed è una proprietà del materiale
- La legge di Newton consente di misurare uno stato di sforzo a partire da uno stato di deformazione
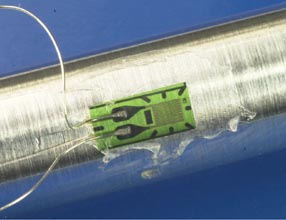
Trasduttore estensimetrico a resistenza
Sono basati su principio che l’allungamento di un conduttore provoca una aumento di resisteza proporzionale all’allungamento stesso
La sensibilità è aumentata ripiegando il conduttore su se stesso più volte
- Un estensimetro (strain gauge) fornisce una misura puntuale (mediata sulla lunghezza della patch)
- Un estensometro (extensometer) fornisce una misura media mediante un meccanismo a leve che deforma un estensimetro

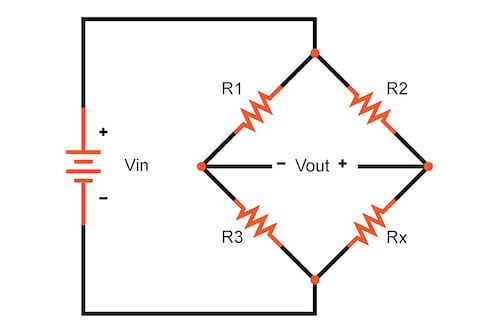
Misura della variazione di resistenza
- Le misure differenziali sono sempre preferibili perché danno maggiore sensibilità
- Nel circuito a ponte di Wheatstone se le resistenze sono tutte uguali il ponte è detto bilanciato e \(V_\mathrm{out}=0\)
- In generale vale:
\[ V_\mathrm{out} = \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1} - \frac{\Delta R_2}{R_2} + \frac{\Delta R_3}{R_3} - \frac{\Delta R_4}{R_4}\right) \]
Nota
Cioè: variazioni su rami adiacenti si sottraggono; variazioni su rami opposti si sommano!
Misura della variazione di resistenza: quarto di ponte
Se una delle 4 resistenze è un estensimetro resistivo:
\[ V_\mathrm{out} = \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1}\right) = \frac{V_\mathrm{in}}{4}G_F\varepsilon_l \]
Misura della variazione di resistenza: mezzo ponte
Se sue resistenze adiacenti sono ER, la seconda può compensare la temperatura:
\[ V_\mathrm{out} = \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1} - \frac{\Delta R_2}{R_2}\right) \] Se sue resistenze opposte sono ER, la combinazione aumenta la sensibilità:
\[ V_\mathrm{out} = \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1} + \frac{\Delta R_3}{R_3}\right) \]
Misura della variazione di resistenza: ponte intero
Si usano 4 ER, a due a due compensati in temperatura e raddoppiando la sensibilità
\[ V_\mathrm{out} = \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1} - \frac{\Delta R_2}{R_2} + \frac{\Delta R_3}{R_3} - \frac{\Delta R_4}{R_4}\right) \]
Dinamometro a mensola
Nell’esercizio sul dinamometro a mensola si è usata l’espressione: \[ V=3/2GV_i\frac{lG_F}{EBH^2}F+V_0 \] Per una trave snella la deformazione massima è: \[ \varepsilon_l = \frac{6l}{EBH^2}F \]

e per il quarto di ponte si ha (con \(V_i=GV_\mathrm{in}\) e \(V_0\) che è la tara): \[\begin{align} V_\mathrm{out} &= \frac{V_\mathrm{in}}{4}\left( \frac{\Delta R_1}{R_1}\right) = \frac{V_\mathrm{in}}{4}G_F\varepsilon_l \\ \frac{V}{V_\mathrm{in}} &= \frac{\varepsilon_l}{4}G_F = \frac{6l}{4EBH^2}F G_F = 3/2\frac{lG_F}{EBH^2}F \end{align}\]
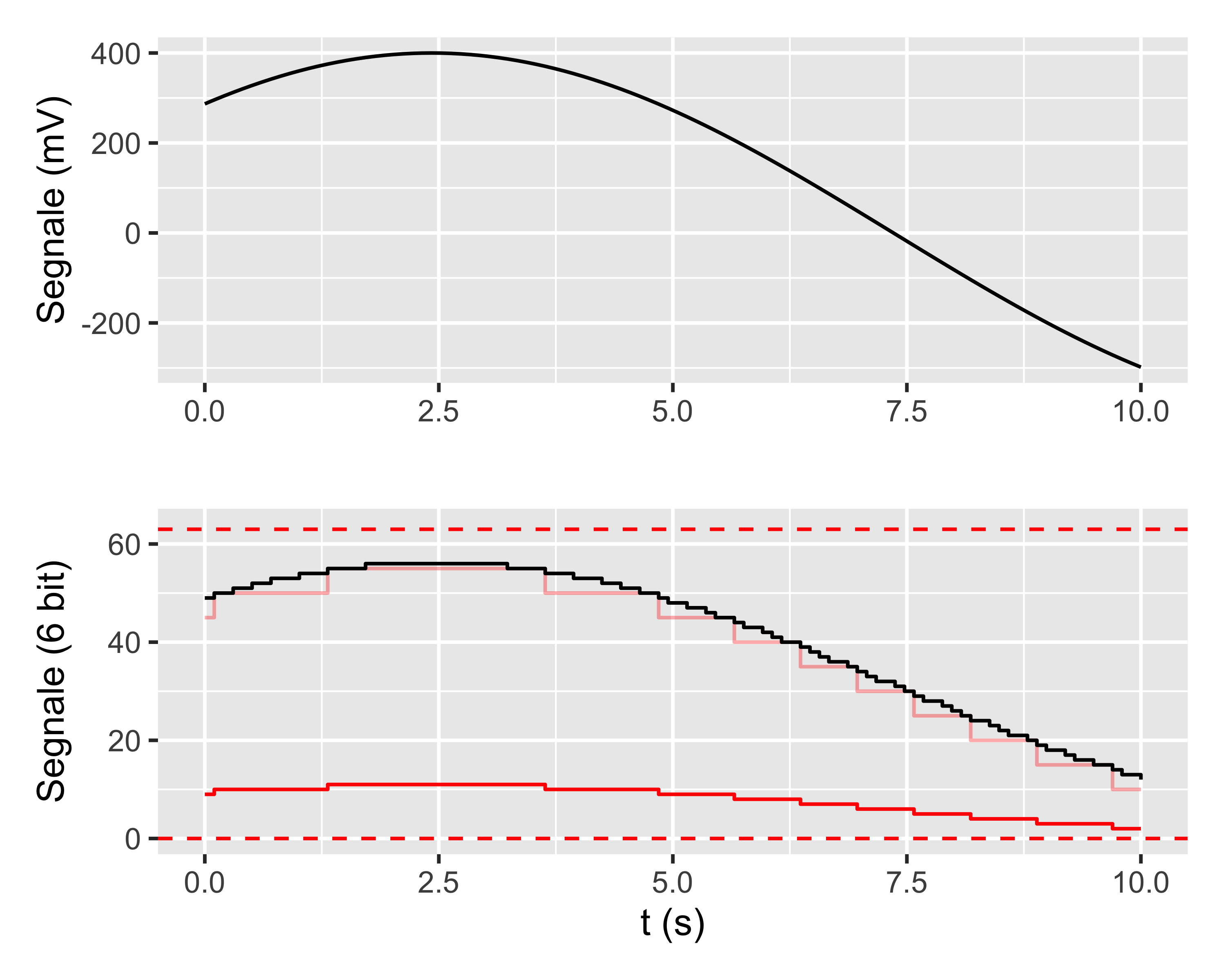
Digitalizzazione di un segnale
- Il trasduttore generalmente produce un segnale debole che va condizionato prima possibile
- Cioè, va collegato con cavi schermati di qualità e più corti possibile ad un convertitore/amplificatore
- Il segnale amplificato (in tensione o in corrente) va digitalizzato cioè convertito in un valore su scala discreta, e codificato, cioè rappresentato in valore numerico
- Il numero di bit del convertitore dà il numero di livelli: es. 8 bit significa 256 livelli